
Team Vulcan
The Warrior
Summary
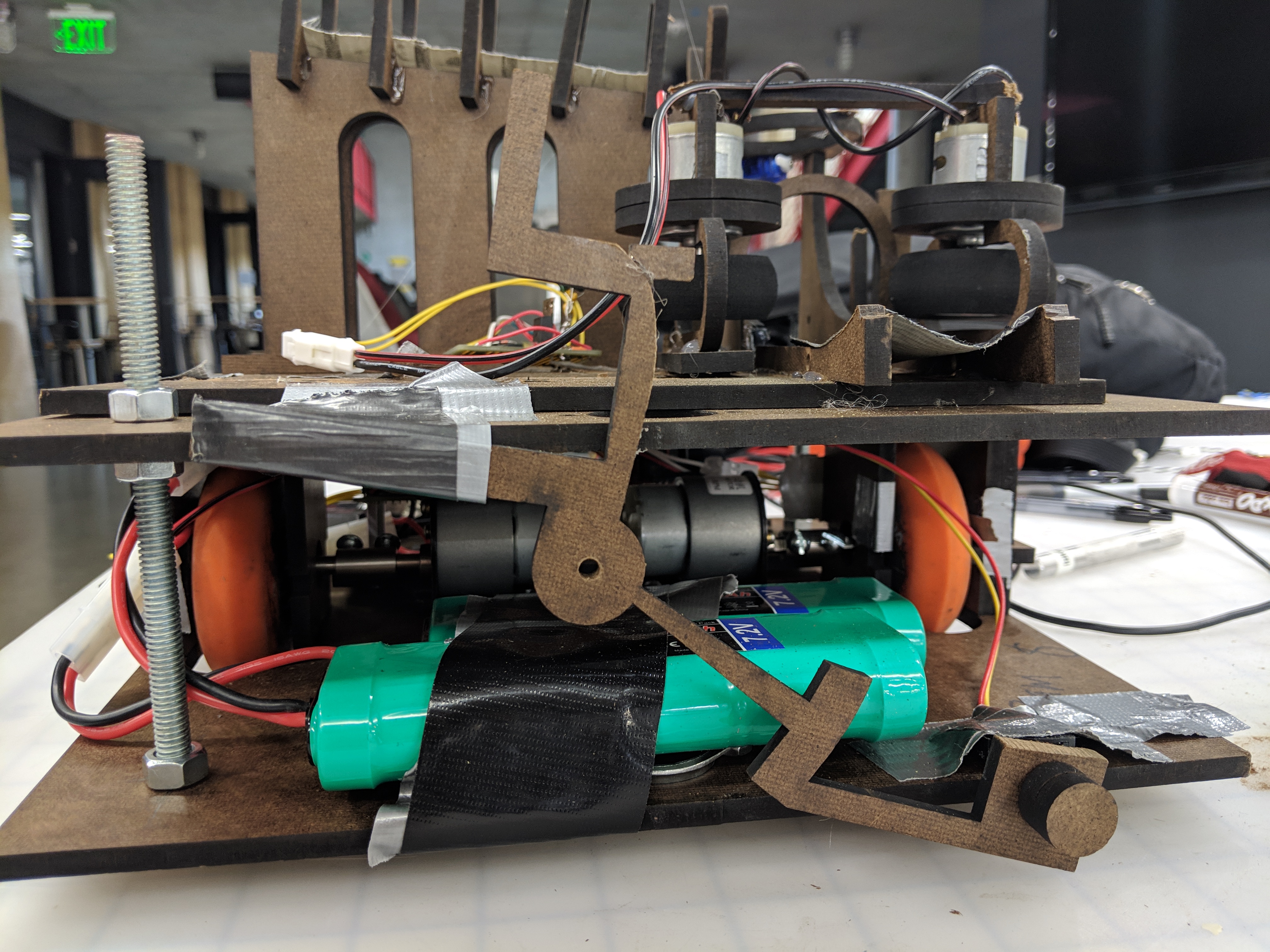
We built a simple robot with 2 major subsystems - drivetrain and launcher. Initially we planned to have closed loop control using encoders placed on the sides of the robot, but due to complexity of the system, this approach was not producing reliable, repeatable results. In a bid to check-off the night before the deadline, we switched the wall-riding and timed moves.
Initially the launcher was supposed to be a catapult powered by a solenoid. This approach proved to be inefficient in delivering momentum to the fireballs, and therefore we switched to a flywheel system seen here.